

Content Display
Meine Lösung basiert auf FHEM, einem Raspberry 4 mit HDMI Touchscreen sowie passenden CanBus Hat. CanBus Hat und Display stammen von Waveshare (siehe Links). Angezeigt werden CanBus Daten wie die Öltemperatur und der Ladezustand der Starterbatterie sowie aktuelle Wetter, Spritpreis und „GPS“ Daten, die Hinweise auf Auffälligkeiten in der Nähe geben.





3-Druck Gehäuse
Meine Idee fing damit an, dass ich den vorhandenen Fahrtenschreiber entfernt habe, da ich nicht gewerblich unterwegs bin und der Fahrtenschreiber mehr Ärger als nutzen bringt. So liess sich die Sommer-/Winterzeit nur über den Fahrtenschreiber ändern. Der nun leere existenten DIN-0 Schacht musste natürlich gefüllt werden…meine erste Überlegung Richtung CB Funk habe ich nach Recherchen im Internet verworfen. So kam der Gedanke auf, die vorhandene Schnittstelle mit CanL, CanH sinnvoll zu nutzen.
Mittels 3-Drucker und dem Hochtemperatur Filament Apollo X habe ich mit einigen mehrstündigen Druckjobs doch recht robuste Gehäuse gedruckt, alle Druckdateien habe ich mit Freecad selbst konstruiert. Hier der Link zum Git -> Github STL-Dateien. Neben dem eigentlichen Gehäuse habe ich auch einen Halter für den LTE Router + GPS Empfänger erstellt.








Raspberry, Can Hat, GPS, WLED
Es werkelt ein Raspberry 4 (noch vor Corona gekauft…) mit dem Waveshare RS485 CAN HAT (B) und dem Grove Air530 GPS Empfänger im Bulli. Die Stromversorgung erfolgt über den vorhandenen Fahrtenschreiber Adapter. Dort greife ich 12 Volt ab, die über den CAN HAT die Stromversorgung des Raspberry sicherstellen. Theoretisch könnte der Raspberry auch den GPS Empfänger mit 5 Volt versorgen, in Summe sind aber zu viele Verbraucher aktiv. Daher habe einen DC DC Stepdown Konverter (AliExpress) am gleichen 12 Volt Anschluss angeschlossen. Dieser ist speziell für Autos geeignet, da er sehr kompakt und sicher gebaut ist.
Mittels Touchscreen und WLED (Esp32) steuere ich ein LED Band, hier werde ich später Infos ergänzen.
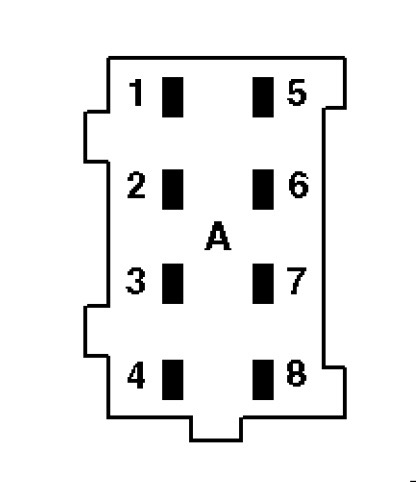
Die Hauptverbindung basiert auf den schon vorhandenen Anschlüssen des Fahrtenschreiber. Mittels eines „TE Connectivity Timer Automotive, Kfz-Steckverbinder Gehäuse, Stecker, 8-polig / 2-reihig“ habe ich CanH, CanL, CanMinus mit dem CAN Hat verbunden. Die Belegung sieht wie folgt aus:
Elektrische Steckverbindung „A“
1 – Spannungsversorgung, plus, Klemme 30
2 – Beleuchtung, Klemme 58d
3 – Spannungsversorgung, plus, Klemme 15
4 – CAN-Bus, high
5 – Spannungsversorgung, minus, Klemme 31a
6 – Spannungsversorgung, minus, Klemme 31
7 – CAN-Bus, minus
8 – CAN-Bus, Low



Software
Zu guter Letzt ein paar Worte zur Software. Der Raspberry läuft mit dem 64Bit Raspberry PI OS (Debian), die Anzeige Software basiert auf FHEM und hier dann FTUI3. Im Kiosk Modus des Browsers lässt sich mit FTUI3 auf Pixel Level festlegen, was wo angezeigt wird. Die Daten aktualisieren sich automatisch, es gibt einen Tag&Nachtmodus des Displays (FTUI3 Feature), der mittels Licht An/Aus (CanBus Info) geschaltet wird.
Apropo Daten: die Software fragt diverse API Schnittstellen auf Basis der GPS Daten ab (openweathermap, Tankkönig, Verkehrslage.de). Somit erhalte ich immer aktuelle Infos aus direkter Nähe. Die Motor Can Daten, die mir zur Verfügung stehen, beinhalten meines Wissens nach keine GPS Infos (habe ja das Discovery und damit auch GPS im Bulli), daher der Umweg über einen eigenen GPS Empfänger.
Hier ein paar CanBus ID’s:
ID #588: Byte7 dezimal - 60. Einheit "C". Öltemperatur
ID #570: Byte2 dezimal * 0,05 + 5. Einheit "V". Starter BatteriespannungDas ganze habe ich mit Docker Container implementiert, da hiermit ein einfaches Recovery der Software möglich ist.